

In this chapter we will take a closer look at the principles and alternative methods of searching for solutions in the presence of constraints. Let us first recall what we are talking about. We assume we have the standard pattern of a constraint program:
|
The model part contains the logical model of our problem. It defines the variables and the constraints. Every variable has a domain of values that it can take (in this context, we only consider domains with a finite number of values).
Once the model is set up, we go into the search phase. Search is necessary since generally the implementation of the constraints is not complete, i.e. not strong enough to logically infer directly the solution to the problem. Also, there may be multiple solutions which have to be located by search, e.g. in order to find the best one. In the following, we will use the following terminology:
| SearchSpaceSize = DomainSizeNumberOfVariables |

Figure 12.1: A search space of size 16
Figure 12.1 shows a search space with N (here 16) possible total assignments, some of which are solutions. Search methods now differ in the way in which these assignments are visited. We can classify search methods according to different criteria:
Here is a selection of search methods together with their properties:
| Method | exploration | assignments | random |
| Full tree search | complete | constructive | no |
| Credit search | incomplete | constructive | no |
| Bounded backtrack | incomplete | constructive | no |
| Limited discrepancy | complete | constructive | no |
| Hill climbing | incomplete | move-based | possibly |
| Simulated annealing | incomplete | move-based | yes |
| Tabu search | incomplete | move-based | possibly |
| Weak commitment | complete | hybrid | no |
The constructive search methods usually organise the search space by partitioning it systematically. This can be done naturally with a search tree (Figure 12.2). The nodes in this tree represent choices which partition the remaining search space into two or more (usually disjoint) sub-spaces. Using such a tree structure, the search space can be traversed systematically and completely (with as little as O(N) memory requirements).
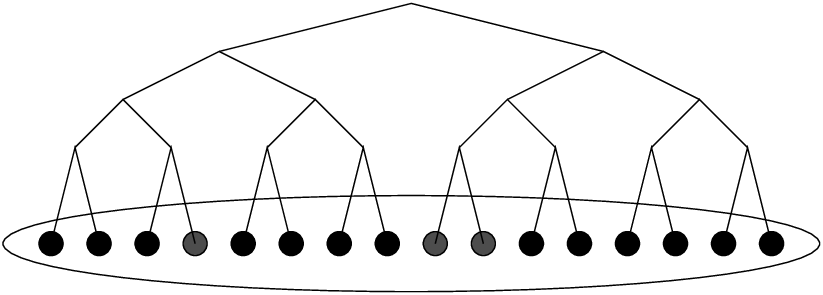
Figure 12.2: Search space structured using a search tree
Figure 12.4 shows a sample tree search, namely a depth-first incomplete traversal. As opposed to that, figure 12.3 shows an example of an incomplete move-based search which does not follow a fixed search space structure. Of course, it will have to take other precautions to avoid looping and ensure termination.
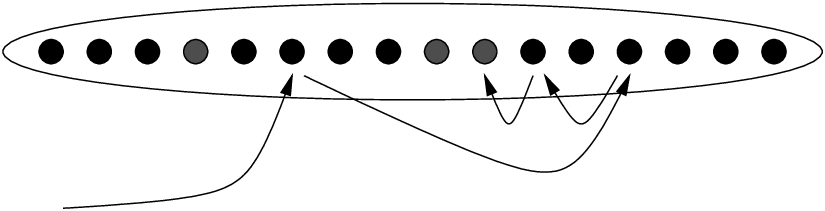
Figure 12.3: A move-based search
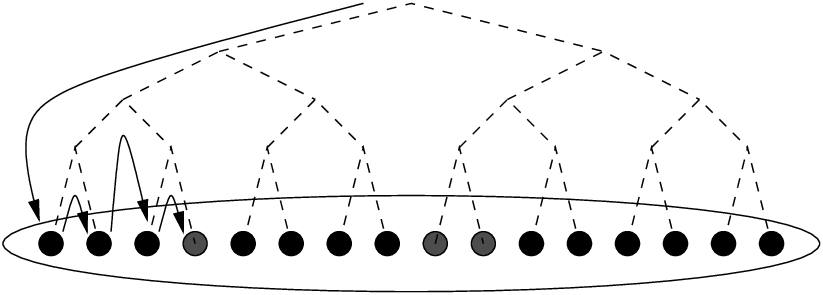
Figure 12.4: A tree search (depth-first)
A few further observations: Move-based methods are usually incomplete. This is not surprising given typical sizes of search spaces. A complete exploration of a huge search space is only possible if large sub-spaces can be excluded a priori, and this is only possible with constructive methods which allow one to reason about whole classes of similar assignments. Moreover, a complete search method must remember which parts of the search space have already been visited. This can only be implemented with acceptable memory requirements if there is a simple structuring of the space that allows compact encoding of sub-spaces.
Many practical problems are in fact optimisation problems, ie. we are not just interested in some solution or all solutions, but in the best solution.
Fortunately, there is a general method to find the optimal solution based on the ability to find all solutions. The branch-and-bound technique works as follows:
The branch_and_bound library provides generic predicates which implement this technique:
Since search space sizes grow exponentially with problem size, it is not possible to explore all assignments except for the very smallest problems. The only way out is not to look at the whole search space. There are only two ways to do this:
In the following sections we will first investigate the considerable degrees of freedom that are available for heuristics within the framework of systematic tree search, which is the traditional search method in the Constraint Logic Programming world.
Subsequently, we will turn our attention to move-based methods which in ECLiPSe can be implemented using the facilities of the repair library.